Overview
About This Club
Le vostre autoproduzioni, i modelli, diorami, plastici, tutto quanto ruota intorno al modellismo "reale"
- What's new in this club
-

I magazzini raccordati di Milano
Andrew245 replied to Cancio's topic in Fermodellismo's Fermodellismo
Magnifico lavoro, curatissimo, complimenti all'autore, bravissimo ! -

I magazzini raccordati di Milano
Paolomen replied to Cancio's topic in Fermodellismo's Fermodellismo
Molto bello, grazie. -
Bell'articolo sui Magazzini Raccordati di Milano (Centrale), di stampo modellistico ma con ampio e riccamente illustrato preambolo storico sulla controparte reale. Lo trovate qui.
-
Grazie xsiv ! No , solo statico, tutti i miei modelli lo sono in quanto non possiedo un plastico per farli girare e sarebbe così inutile spendere denaro per la motorizzazione ; io li realizzo come scopo storico ferroviario , soggetti il più possibile insoliti o ancora inediti ; questo lo realizzai tre anni fa , so che recentemente lo ha proposto anche artigianalmente una ditta ; ve ne mostrerò un altro di questa serie inedito !
-
cavoli che bello complimenti!! ma è motorizzato o solo statico?
-
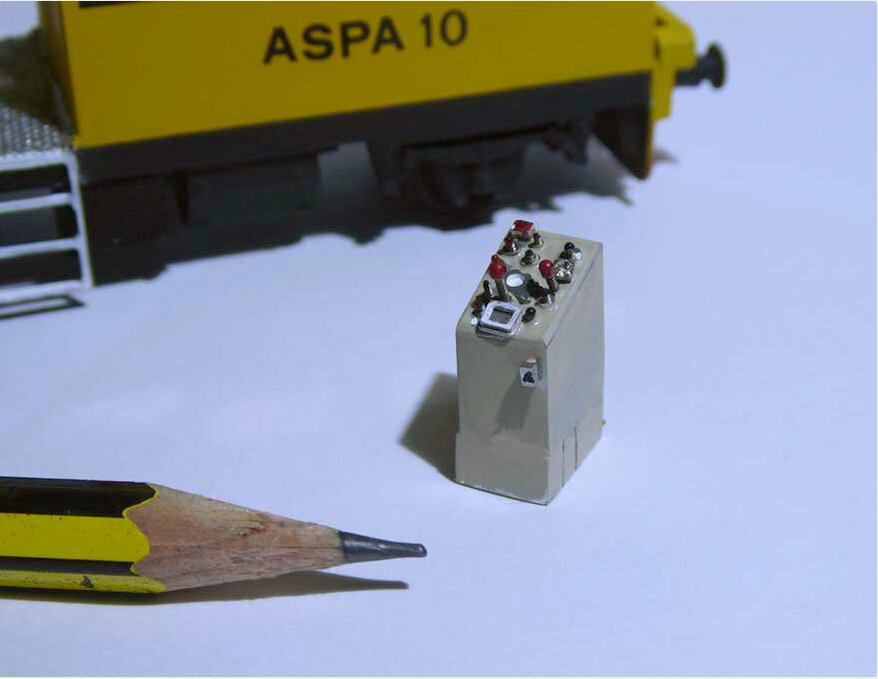
Buongiorno a tutti ; vi presento questo veicolo per trasporto personale ferroviario, ASPA 10 di S.V.I. Il veicolo ASPA 10 è un mezzo d’opera ferroviario autopropulsato adatto per essere utilizzato come semipilota, per trasporto in linea di personale e come veicolo di soccorso al personale in linea. È costituito da un telaio di base, rodiggio ferroviario, impianto frenante di tipo pneumatico, gruppo propulsore diesel-idraulico, cabina di guida e trasporto passeggeri (nr. 10 persone sedute). -Veicolo curioso quindi che mi ha interessato subito da riprodurre in H0, piuttosto impegnativo, la semplicità inganna, più che altro per i vetri, da incastonare, la verniciatura con le varie e difficili mascherature ed altri dettagli ; L'unica cosa, per non tediarmi troppo, che non ho autocostruito, sono stati gli assi ed i parasale, ricavati invece e rielaborati un po, da un vecchio carro della BRAWA, che si sono rivelati adatti, buona quindi la scorrevolezza del modello . Modello 100% metallo . Fortunatamente ho trovato ottime foto per documentarmi . -Ho dovuto necessariamente riprodurre anche gli interni, sia per completezza ed anche perchè permette di vederne il semplice allestimento attraverso i vetri . Particolarità di questo veicolo, a colpo d'occhio, sembra che il frontale sia dalla parte del cofano motore, come qualsiasi altro rotabile convenzionale, mentre invece la cabina di guida è posta sul lato opposto quindi anche il piccolo banco di manovra è stato realizzato . La pavimentazione antiscivolo , è stata realizzata con retina di tulle incollata . Grazie dell'attenzione !










-
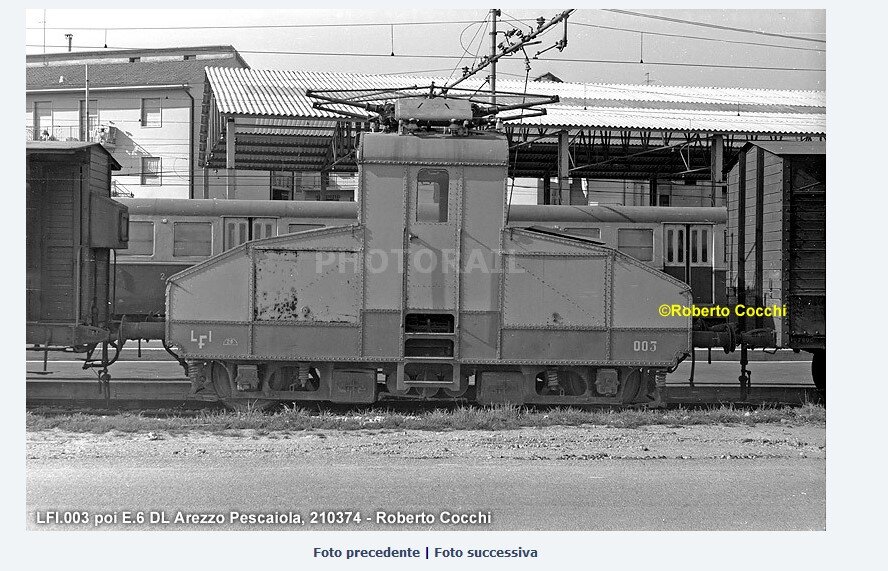
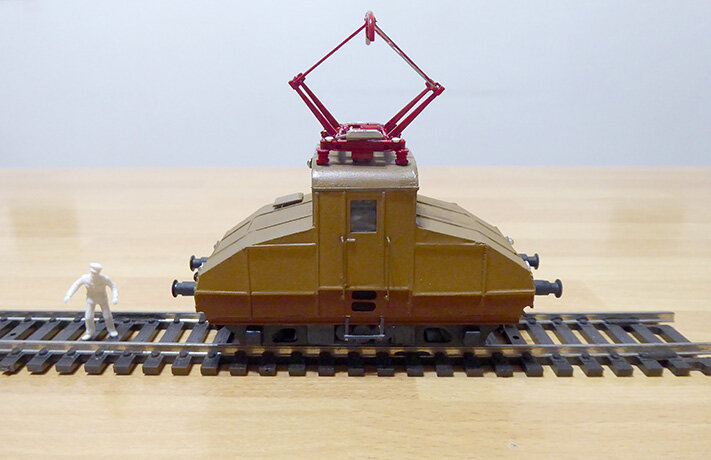
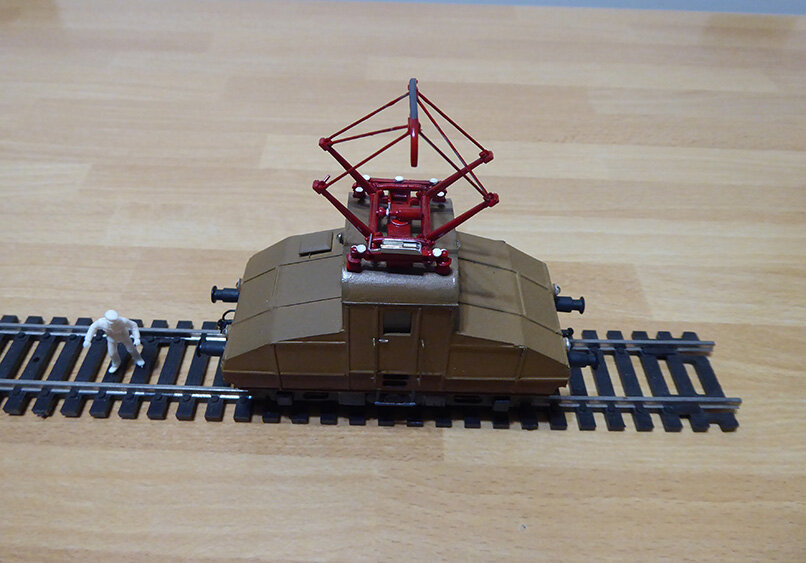
Buon giorno a tutti . Da sempre ho un vivo interesse per le ferrovie concesse o più in particolare per le LFI e non so bene il perchè, che non ho mai avuto la fortuna di visitare , credo sicuramente per il curioso e vario parco di rotabili vetusti del passato e che offrono spunti interessanti nel modellismo, quindi prevedo di continuare ad interessarmene con altri soggetti particolari o inediti . Il locomotore in questione, lo possiamo considerare un vero fantasma della rotaia di LFI, tant'è che le foto reperibili nel web sono rarissime, due, ne posso pubblicare sfortunatamente solo una per motivi di copyright e non le altre due essenziali reperite su libri, ovviamente nemmeno il disegno . Il N°28 di Tutto treno storia, fotoalbum, ne contiene una molto significativa e che mi ha permesso di completare il modello , sono riuscito poi a trovare un validissimo disegno con le misure nel libro di Piero Muscolino, " Le ferrovie secondarie di Arezzo " con notizie molto interessanti . Era un piccolo locomotore della lunghezza fuori tutto di 6400 mm, inizialmente classificato ( negli anni 50 " ) come 003 ed attualmente pare ancora esistente come riclassificato E6 ma ridipinto in nero, foto non ne ho trovate . Fu costruito sulla base di un carrello, poi modificato, di avanzo delle Officine Sociali di Pescaiola e veniva impiegato per le manovre in deposito . Montava due motori TIBB GDTM 2454 con una potenza oraria di 270 kW . Il passo rigido fu portato a 4,5 m. e prestazione di 65 tonn. Singolare , tozzo nella sua forma , è questa la particolarità che in me ha attirato l'attenzione, per un modesto locomotore sconosciuto a molti, ma proprio per questo merita indubbiamente un posto come ricordo storico e nel fermodellismo ; non mi risulta nessuna riproduzione artigianale H0 in merito, quindi presumo il mio, sia il solo modello esistente, se avete notizie ulteriori , ben vengano ! Solita tecnica mia che ben conoscete nella realizzazione, riduzione in esatta scala H0 del disegno, ruote in ottone al tornio, carrelli autocostruiti più gli altri dettagli vari, come sempre modello 100% in metallo. Il pantografo deriva da un Lima molto rielaborato , in particolare lo strisciante che era mono componente da quanto risulta nelle foto . Noterete le giunture, l'unica soluzione possibile, la più fine, è stata utilizzando i terminali dei finissimi seghetti di risulta spezzati e che con estrema pazienza ho incollato, al vero le giunzioni erano di media evidenza, ma in scala non è facile riprodurle . Per le decals ho dovuto scervellarmi tra trasferibili a secco e decals di risulta, per fortuna complessivamente poca cosa , mancherebbero due piccole scritte LFI sulle fiancate presso i frontali, se riesco a recuperare qualcosa, senz'altro le applicherò .I ceppi dei freni esistono ma sono nascosti . Questo secondo me è un modello motorizzabile, sempre facendo attenzione alle tolleranze in altezza dei carrelli, potrebbero risultare sensibilmente più alti per avere una maggior escursione nelle curve, sebbene il passo risulti corto e non necessiti più di tanto . Per quanto riguarda la livrea , una precisazione è necessaria : Piero Muscolino, negli anni 50, lo descriveva in " castano - isabella " ma foto a colori ovviamente non ne esistono, le due sole trovate , naturalmente hanno subito le variazioni di degrado del tempo ma evidenziano che il locomotore era molto sbiadito o fortemente schiarito tanto da sembrare beige; io ho accettato la descrizione di Muscolino, non esistono riferimenti di tonalità RAL precisi , ma va tenuto conto che non era di certo un locomotore da dedicare amorevoli cure estetiche , anzi era parecchio sporco..A voi le immagini ed il giudizio..per quanto mi riguarda, come autocritica, ne sono molto soddisfatto, posso dire di essere riuscito a catturarlo bene in scala, dico questo perchè se un mio modello ha qualcosa che non va , lo scarto subito e questo succede specialmente all'inizio, me ne accorgo rapidamente se le cose non collimano durante l'assemblaggio e gli spazi mal calcolati ben presto saltano fuori ...Grazie dell'attenzione !




-
- 8
-

-
Una locomotiva a vapore inedita strana ! Autocostruzione ..
Andrew245 replied to Andrew245's topic in Fermodellismo's Fermodellismo
Bene !! -

Una locomotiva a vapore inedita strana ! Autocostruzione ..
UP844 replied to Andrew245's topic in Fermodellismo's Fermodellismo
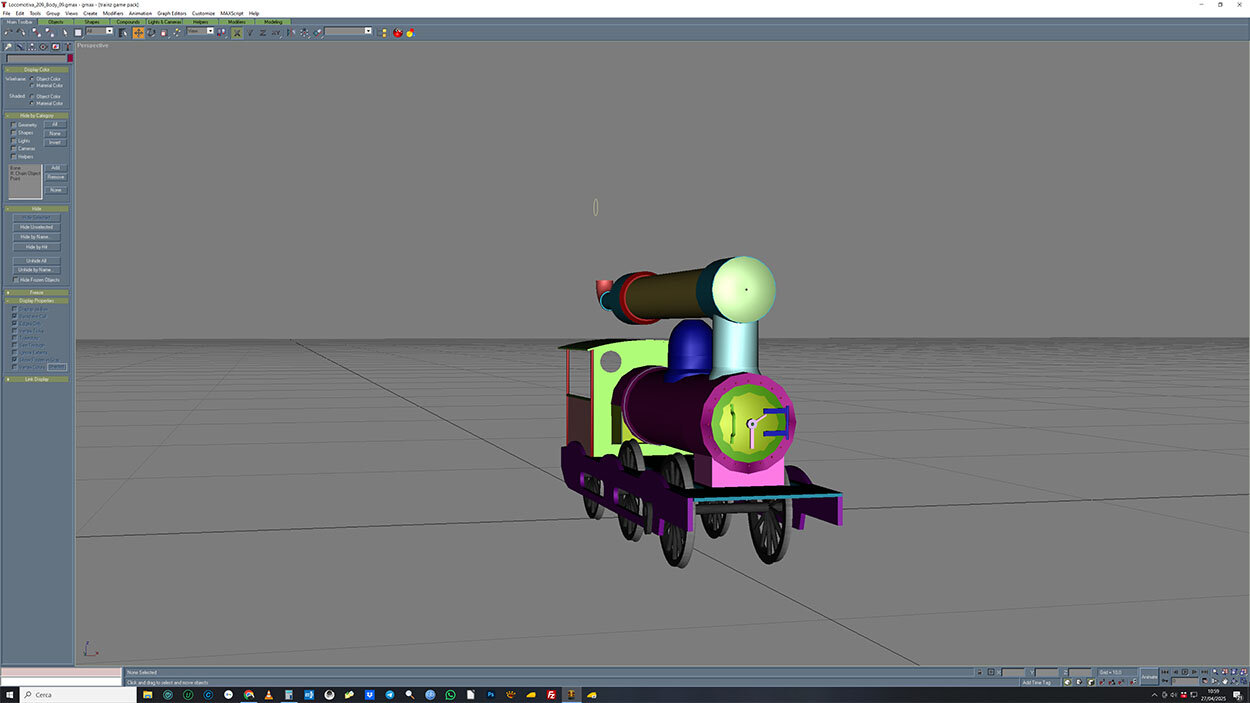
Ohibò, e io come riproduco l'effetto del preriscaldatore nell'enginespec? Magari aumentando il rendimento della caldaia si ottiene un risultato vagamente realistico: per ora, una volta finalizzato il motore delle 740 sperimenterò con le 741 e 743. -

Una locomotiva a vapore inedita strana ! Autocostruzione ..
ALM replied to Andrew245's topic in Fermodellismo's Fermodellismo
Non mi sono dimenticato della cosa. Sta andando avanti.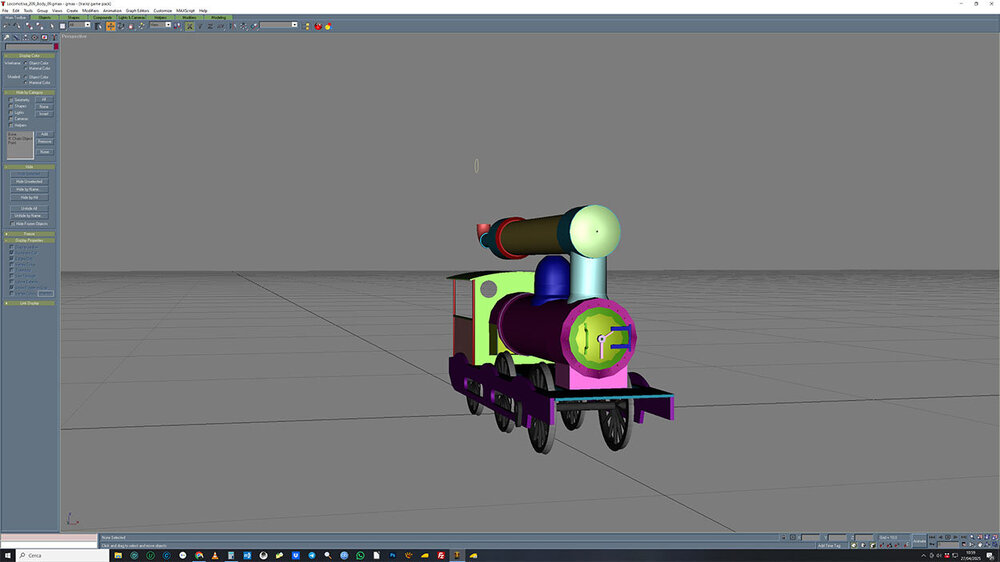
-
Grazie ALM !!
-
Andrea, sei un GRANDE!!!
-
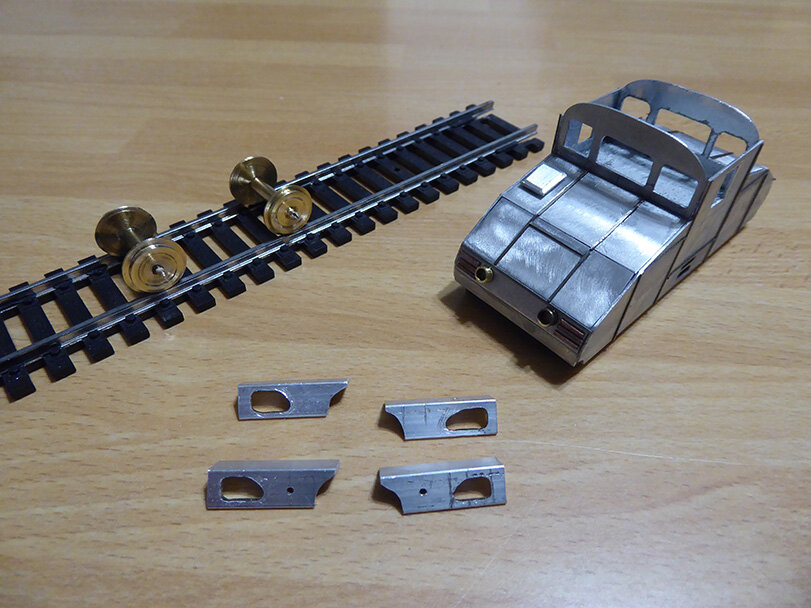
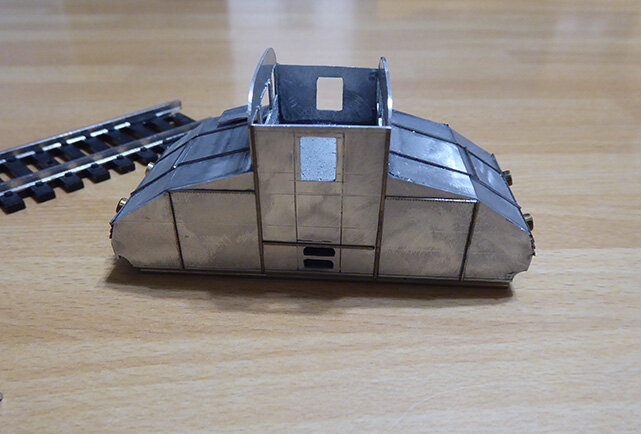
Buongiorno a tutti ; il soggetto scelto è stato per puro caso, una sera , mentre navigavo nel web un po svogliatamente , tanto per trascorrere un po di tempo ; le bellissime foto trovate, mi invitarono immediatamente per rifletterci per una possibile riproduzione in H0, anche perchè il design di questo piccolo locomotore da raccordo industriale, è in sintesi semplice, privo di particolari complessi; questo locomotore è di proprietà delle Industrie Stella S.p.A. a Cuneo Gesso, per la lavorazione legnami, nel loro raccordo ferroviario, a quanto pare poco usato ormai, ma comunque in ottimo stato . Particolare e direi interessante anche la livrea , nel senso che se fosse stata monocromatica, solamente in verde , questo modello alla fine, sarebbe stato un po monotono, però mi ha fatto perdere parecchio tempo per ler le varie mascherature ..Intanto vediamo subilto le proporzioni, misura infatti 8,3 cm con un peso di 64 gr, non sono pochi per un modellino statico privo di motorizzazione, la sostanza in metallo si fa sentire, il cofano infatti è un blocco pieno, sempre di alluminio, con il frontale fresato per ricavarne poi la griglia che ho creato pazientemente con barrette tagliate di punti metallici . Parasale e boccole, come sempre eseguite tramite fresa, il corretto spessore del telaio da un'ottima senzazione di robustezza del modello; piuttosto noiose le mascherature per fascie nere da dipingere sui frontali ; terribilmente piccole le manigliette sui portelloni, oltre che a crearle, facevo fatica poi a trattenerle con le pinzette e fissarle ... Eccolo allora allo stato operativo, che dimostra anche il corretto allineamento dei respingenti ...proporzioni rispettate, disegni quotati ovviamente, non esistono, ma penso di aver studiato bene il soggetto e centrato correttamente la scala . Questo sarebbe un ottimo soggetto adatto in TS giusto per l'impiego in un raccordo di segheria, farebbe comodo anche a me visto che nel mio scenario ho creato una ottima area di lavorazione legnami ..ma sono ignorante totale con i software 3D... Grazie dell'attenzione !












-
Grazie Piero ! Beh , potrei dirti, ci ho fatto l'occhio con l'H0 quindi so calcolare quasi sempre bene le quote tramite alcuni trucchetti, ora un po difficile da spiegare qui ; ho realizzato veramente tanti rotabili , in diversi i disegni non esistono proprio , raramente ho fallito ed istantaneamente mi accorgo se un soggetto è fattibile o no , anche in questo caso nessun disegno ovviamente esiste , ma controllo le proporzioni in diversi modi ; con il tempo mostrerò altro , soggetti inediti ed è su questo che punto , perchè non li avremo mai prodotti commercialmente , ma anche perchè meritano di essere ricordati e facenti parte anch'essi della nostra storia delle ferrovie secondarie ! In ultima cosa , non sono assolutamente necessari attrezzi sofisticati, già il taglio del lamierino di alluminio con archetto da orefice e punta secca per tracciare, permette metà di un soggetto , naturalmente calibro alla mano sempre e saper lavorare con precisione di lima , se non si impara questa , nessun modello riuscurà bene !
-
Ma come fai!!! Beato te, riesci a realizzare dei veri capolavori. Complimenti, davvero
-
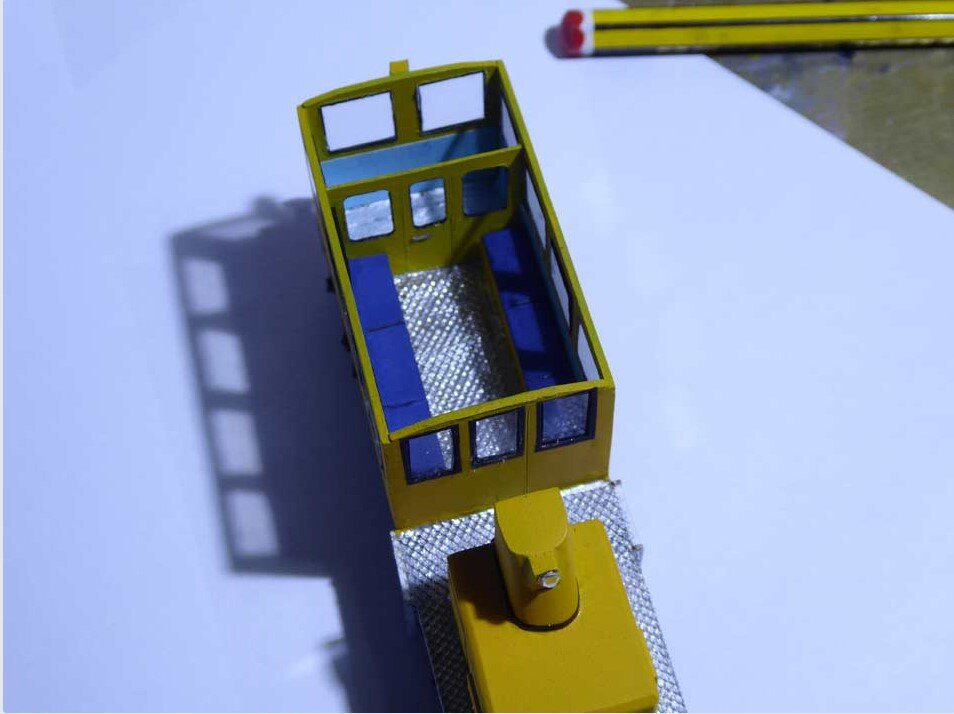
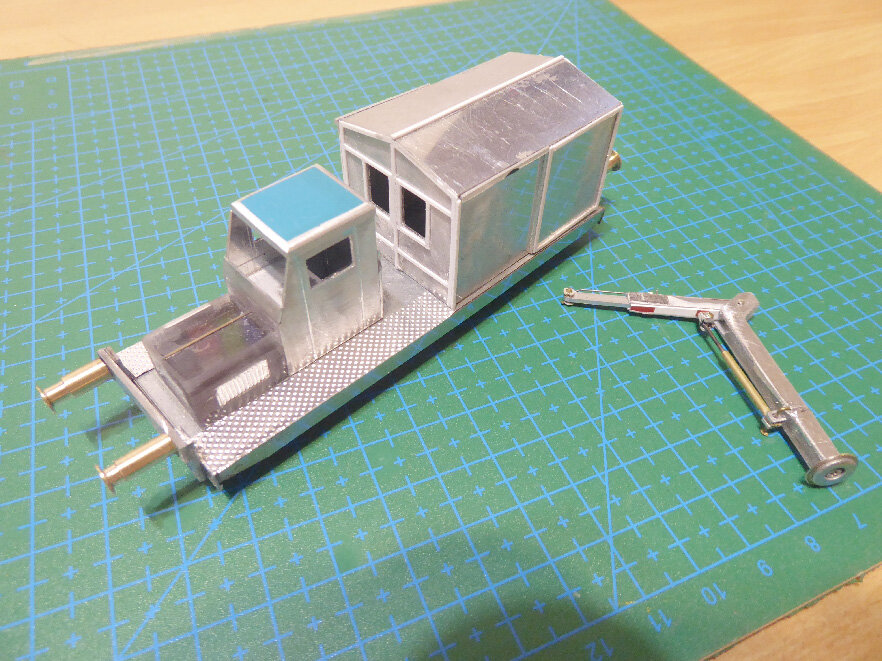
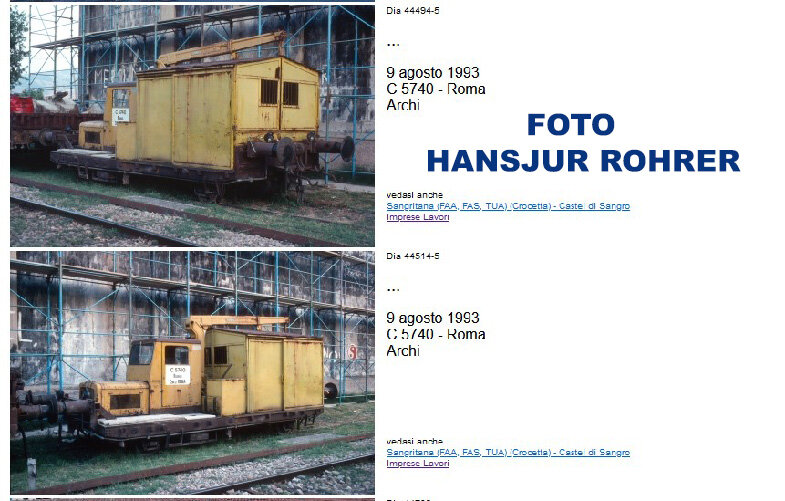
Buon giorno a tutti! Vi presento questa mia ultima inedita novità, avendo trovato le fotografie di Hansjur Rohrer, che rielaborandole con un software mio speciale, mi hanno permesso di migliorarle ed evidenziarne meglio i dettagli, permettendomi meglio la autocostruzione del modello. Motocarrelli di servizio, con questa tipologia biposto (almeno credo) di cabina, ne ho visti di diversi tipi, talvolta con cabina laterale, questa mi ha invogliato di più avendo il casottino e la gru. Questo esemplare è stato fotografato, come vedete nella foto, nel 1993 presso Roma. È un modello di facile costruzione e volendo motorizzabile, a patto di trovare le ruote che devono essere necessariamente molto piccole da 12 mm di diametro che ho dovuto realizzare al tornio. Per ottenere il corretto assetto di altezza corretto rispetto il piano ferro, bisogna però mantenere un bordino estremamente basso, e che essendo così piccole, verranno poi occultate, quindi assai poco evidenti esteticamente. Solo in questo caso mi sono preso la licenza di tralasciare la realizzazione delle boccole e balestre, sarebbe stato un lavoro faticoso del tutto superfluo, ciò che mi interessava piuttosto, era la perfetta realizzazione delle sovrastrutture. La gru, è in alluminio, completamente girevole ed estensibile oltre al poter essere abbassata ed alzata a piacere, manca il gancio, ma nelle foto sembra non fosse presente, comunque lo farò. Un altro vantaggio di questo modello è la mancanza di scritte particolari, che facilita le cose, le uniche insegne che aveva erano sulle fiancate della cabina,. Realizzate in bianco con una rimanenza di decals, mentre le scritte gliele ho create con i trasferibili a secco R 41. Notate nella foto al grezzo, il bell'effetto del piano calpestabile creato con rullino zigrinato e stagnola adesiva, mentre il cofano motore è in plexiglass. Non ho fatto invecchiature, che avrebbero reso senz'altro più interessante ancora il modello, preferendolo invece come a nuovo. Pesa un pochino avendo parti in acciaio come il pianale, rendendolo così stabile sul binario (se ce l'avessi..ma un plastico non lo avrò mai !! ). Se riesco a reperire foto di un esemplare simile con cabina laterale, non mancherò di realizzarlo. Prossimamente ritornerò con un ulteriore draisina della ferrovia Camonica! Grazie dell'attenzione!








-
Anch'io ne posiedo una valanga di foto di tutti i tipi, ho un archivio immenso che manco mi ricordo cosa contengono alcuni hard disk o DVD ..
-
Oh, ne ho raccolte diverse migliaia nel tempo... Solo USA ne ho più di 45.000 Ti ho mandato un messaggio personale.
-
Magnifica foto ! Scaricata !
-
Un mio caro amico, oggi purtroppo scomparso, ne aveva una in versione light gray. L'abbiamo provata a far girare su un cerchio di binari di 1m di diametro sul tavolo del soggiorno. In tale occasione abbiamo provato anche la classe J della N&W e la Mallet 6yb sempre della N&W. La cosa che mi ha colpito di più era che la J era più lunga della 6yb. Per chi non sapesse di cosa stiamo parlando vi mando il link della mia pagina web "NA Steam Locomotive" Basta cercare Union Pacific e Norfolk & Western e cercare la classe per trovare le relative foto.
-
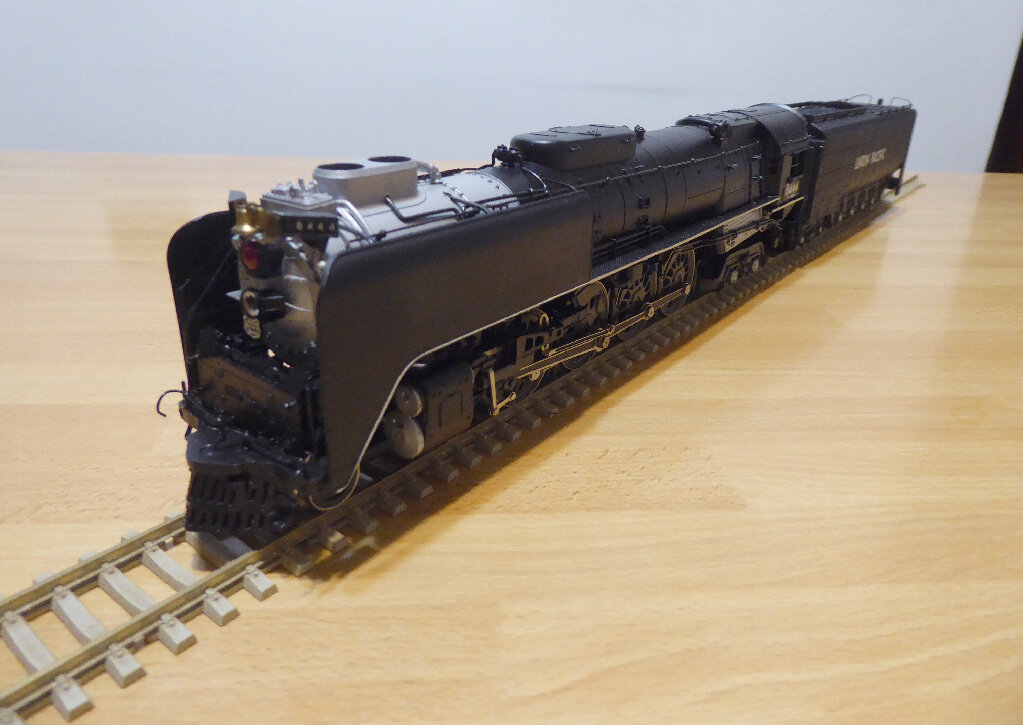
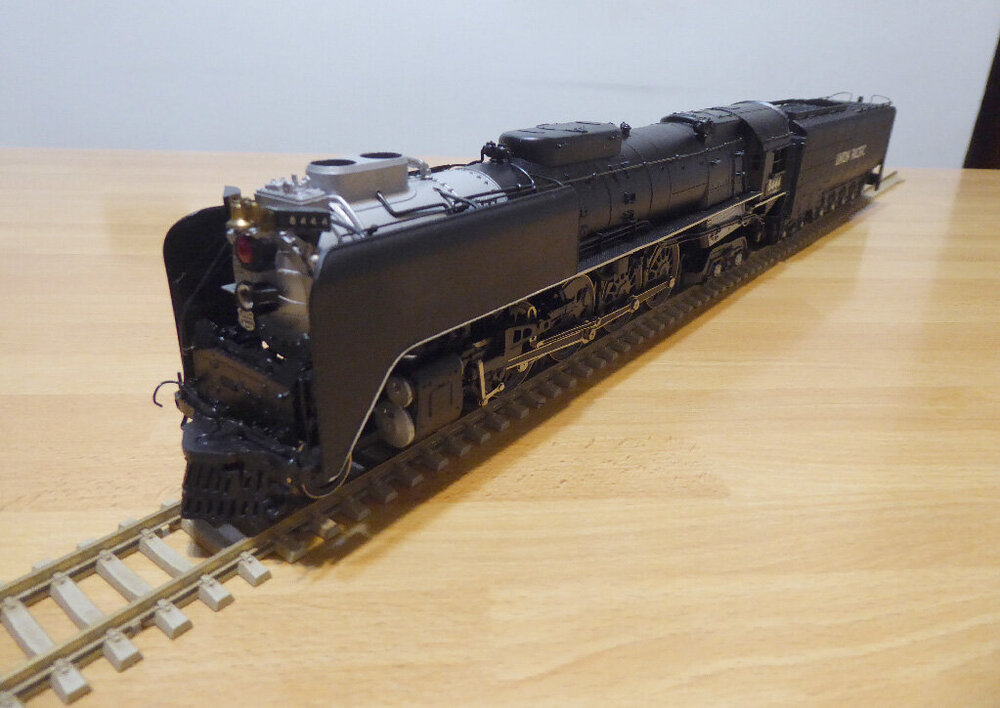
Pensavo all'icona dell'Amico UP 844....ma il modello ce l'ho e fa parte della mia enorme collezione, ne possiedo diverse delle gigantesche vaporiere americane , tra cui la immancabile Big Boy , Allegheny , ed altre ; questa la acquistai parecchi anni fa da un tale che voleva disfarsene , la pagai veramente una pipa di tabacco ..meno di una carrozza attuale in H0 , intonsa come nuova , della vecchia Rivarossi, un modello difficilmente reperibile ed imponente, ben 40 cm di lungezza !! Non ha mai circolato in un plastico, soltanto la sua scatola è sgualcita , pesa parecchio..eccola qui , la cosa strana è che un tempo Rivarossi ne proponeva di qualsiasi tipo di locomotive a vapore estere, aveva in catalogo un vastissimo assortimento, oggi una vaporiera è proposta con il contagocce ; erano modelli curatissimi degli anni 70, molto costosi e non tutti potevano permetterselo, le ricordo nella vetrina di un negozio , si sbavava a guardarle, faceva sognare !! Eccola qui... spero di fare cosa gradita ...




-
Eh lo so.ma se lo confrontiamo con un figurino Preiser ci rendiamo conto delle sue corrette dimensioni...
-
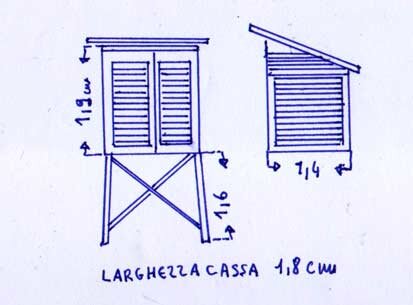
In effetti è un po' minuscola (165 cm di altezza x 155 di larghezza x 120 di profondità) .
-
Dunque, ho conservato il mio schema dell'epoca, ma mi rendo conto che in proporzione in Trainz , diventerebbe assai piccolo, se poi lo pensiamo con un figurino di Trainz che di per se in scala H0 si vede abbastanza poco..non so quanto convenga..comunque..eccolo :